Flow matching (FM) is a method that draws 


FM “transforms” noise to data by means of an ordinary differential equation (ODE). The general FM procedure goes like this:
- i) Choose an initial (noise) distribution
- ii) Choose the so-called marginal vector field
for all
- iii) Let
evolve from
to
according to the ordinary differential equation (ODE):
- iv) The final point
is distributed as



We will show which choice of the marginal vector field 
(Notation remarks: Random variables are denoted in capital letters (


1. A first attempt
The simplest idea that comes to mind is to transform noise to data via straight lines connecting noise and data points, and hope that there exists an associated ODE that does the same thing. In other words,
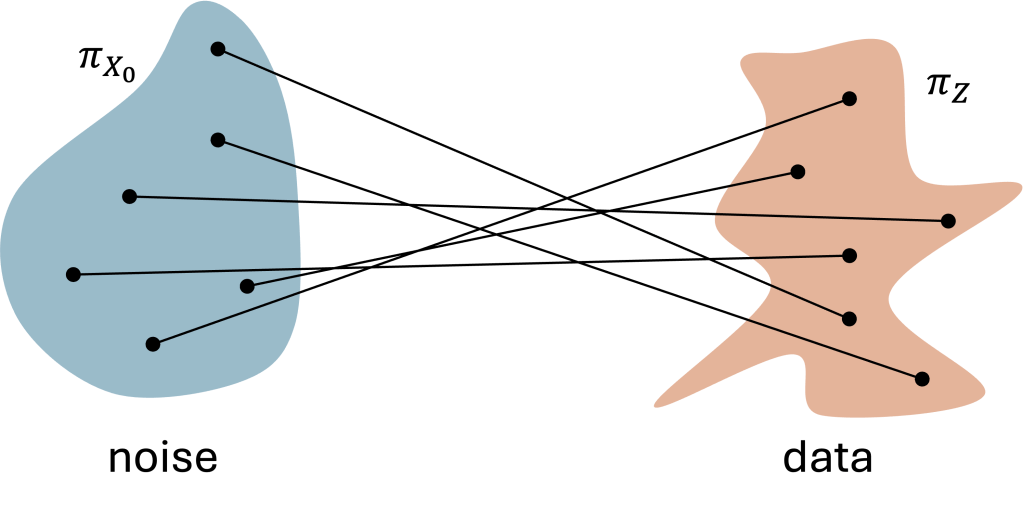
- 1) Define a so-called coupling distribution
between initial noise
and data
, subject only to the constraint that its marginals are the noise and data distributions:
- 2) Draw random noisy and data pairs
.
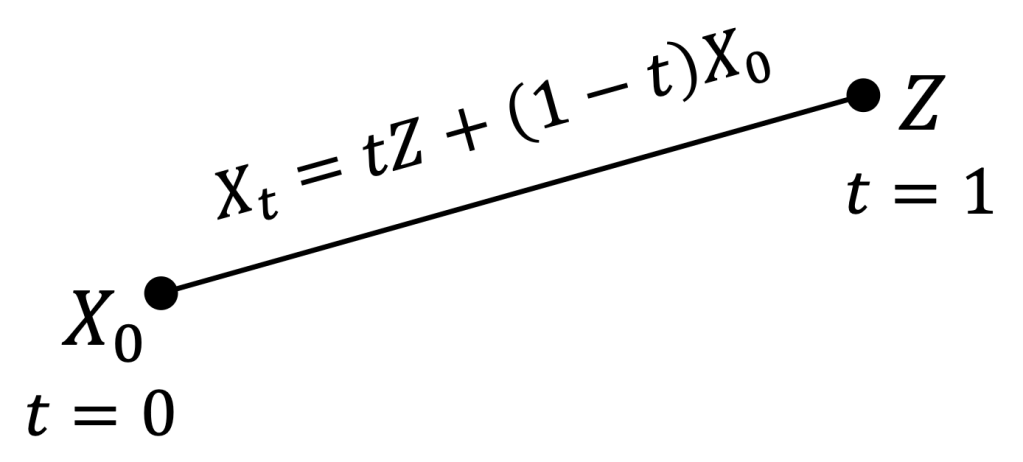
- 3) Connect each
with a straight line
, defined for all
.
- 4) For each point
and time
such that the straight line between them passes through
at time
, i.e.,
.
- 5) Define
.


In this way, when the initial point is 






2. When things go well: Data distribution is a Dirac delta
In the special case where the data distribution is a Dirac delta, i.e., 
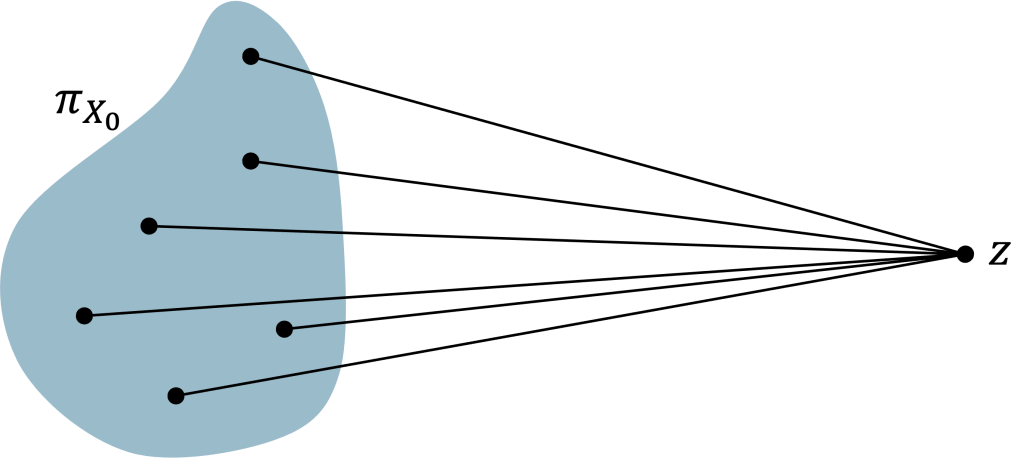
In this case, the evolution of 


where 
Clearly, 
(Note: in (4) we rewrote 
3. When things go wrong and how to fix them
For generic data distributions
How to define 
It turns out that the fix is straightforward: it suffices to average the directions 
![\displaystyle u_t(x) = \mathbb{E}_{(X_0,Z)} \left[ Z-X_0 | \bar{X}_t=x \right] \ \ \ \ \ (5)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+u_t%28x%29+%3D+%5Cmathbb%7BE%7D_%7B%28X_0%2CZ%29%7D+%5Cleft%5B+Z-X_0+%7C+%5Cbar%7BX%7D_t%3Dx+%5Cright%5D+%5C+%5C+%5C+%5C+%5C+%285%29&bg=ffffff&fg=000000&s=1&c=20201002)

Equivalently, we can define 

![\displaystyle u_t(x) = \mathbb E_{Z} \left[ u_t(x|Z) | \bar{X}_t=x \right] \ \ \ \ \ (6)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+u_t%28x%29+%3D+%5Cmathbb+E_%7BZ%7D+%5Cleft%5B+u_t%28x%7CZ%29+%7C+%5Cbar%7BX%7D_t%3Dx+%5Cright%5D+%5C+%5C+%5C+%5C+%5C+%286%29&bg=ffffff&fg=000000&s=1&c=20201002)

4. Flow matching reaches its goal
In this final technical section, we prove that FM reaches its goal, i.e., the final point 
Actually, we will prove a slightly more general result: the ODE solution 

Our main technical tool is the so-called continuity equation, claiming that if the generic probability density function 
![\displaystyle \frac{\partial}{\partial t} p_t(x) = -\mathrm{div} \left[ u_t(x) \, p_t(x) \right] \ \ \ \ \ (7)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+t%7D+p_t%28x%29+%3D+-%5Cmathrm%7Bdiv%7D+%5Cleft%5B+u_t%28x%29+%5C%2C+p_t%28x%29+%5Cright%5D+%5C+%5C+%5C+%5C+%5C+%287%29&bg=ffffff&fg=000000&s=1&c=20201002)
then 
(Note: 
![{\mathrm{div}[f(x)] = \sum_{i=1}^d \frac{\partial}{\partial x_i} f_i(x)}](https://s0.wp.com/latex.php?latex=%7B%5Cmathrm%7Bdiv%7D%5Bf%28x%29%5D+%3D+%5Csum_%7Bi%3D1%7D%5Ed+%5Cfrac%7B%5Cpartial%7D%7B%5Cpartial+x_i%7D+f_i%28x%29%7D&bg=ffffff&fg=000000&s=1&c=20201002)

Then, we will show that 


![\displaystyle \quad = - \int \mathrm{div}\left[ p_{\bar{X}_t|Z}(x|z) u_t(x|z) \right] \pi_Z(z) \, dz \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cquad+%3D+-+%5Cint+%5Cmathrm%7Bdiv%7D%5Cleft%5B+p_%7B%5Cbar%7BX%7D_t%7CZ%7D%28x%7Cz%29+u_t%28x%7Cz%29+%5Cright%5D+%5Cpi_Z%28z%29+%5C%2C+dz+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=ffffff&fg=000000&s=1&c=20201002)
![\displaystyle \quad = - \mathrm{div} \left[ \int u_t(x|z) \frac{p_{\bar{X}_t|Z}(x|z) \, \pi_Z(z)}{p_{\bar{X}_t}(x)} \, dz \, p_{\bar{X}_t}(x) \right] \ \ \ \ \ (11)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cquad+%3D+-+%5Cmathrm%7Bdiv%7D+%5Cleft%5B+%5Cint+u_t%28x%7Cz%29+%5Cfrac%7Bp_%7B%5Cbar%7BX%7D_t%7CZ%7D%28x%7Cz%29+%5C%2C+%5Cpi_Z%28z%29%7D%7Bp_%7B%5Cbar%7BX%7D_t%7D%28x%29%7D+%5C%2C+dz+%5C%2C+p_%7B%5Cbar%7BX%7D_t%7D%28x%29+%5Cright%5D+%5C+%5C+%5C+%5C+%5C+%2811%29&bg=ffffff&fg=000000&s=1&c=20201002)
![\displaystyle \quad = - \mathrm{div} \left[ u_t(x) p_{\bar{X}_t}(x) \right] \ \ \ \ \ (12)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cquad+%3D+-+%5Cmathrm%7Bdiv%7D+%5Cleft%5B+u_t%28x%29+p_%7B%5Cbar%7BX%7D_t%7D%28x%29+%5Cright%5D+%5C+%5C+%5C+%5C+%5C+%2812%29&bg=ffffff&fg=000000&s=1&c=20201002)
where in (10) we applied the continuity equation to the conditional vector field
5. Bonus: Equivalence of the two definitions of
For those who want to check the details, we show here that the definitions (5) and (6) of
![\displaystyle \mathbb{E} \left[ Z-X_0 | \bar{X}_t=x \right] = \int \!\!\! \int (z-x_0) \frac{p_{X_0,Z,\bar{X}_t}(x_0, z, x)}{p_{\bar{X}_t}(x)} \, dx_0 dz](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+%5Cmathbb%7BE%7D+%5Cleft%5B+Z-X_0+%7C+%5Cbar%7BX%7D_t%3Dx+%5Cright%5D+%3D+%5Cint+%5C%21%5C%21%5C%21+%5Cint+%28z-x_0%29+%5Cfrac%7Bp_%7BX_0%2CZ%2C%5Cbar%7BX%7D_t%7D%28x_0%2C+z%2C+x%29%7D%7Bp_%7B%5Cbar%7BX%7D_t%7D%28x%29%7D+%5C%2C+dx_0+dz&bg=ffffff&fg=000000&s=1&c=20201002)




which equals the definition (6) via Bayes’ theorem.

Leave a comment