Kolmogorov-Arnold networks (KAN) were recently introduced in [1] and have already sparked significant interest in the AI community. They offer the potential for both accuracy and interpretability, although some speculate that they might not easily adapt to massively parallelized computation architectures like GPUs.
KANs emerge when edge functions are nonlinear in their inputs and can be expressed as a weighted sum of B-splines. Conversely, when edge functions are linear, the architecture simplifies to the traditional Multi-Layer Perceptron (MLP).
Only time will tell whether KANs will be widely adopted by the AI community. Nonetheless, in this post, we use KANs as a nice opportunity to implement them from scratch in simple Python (no PyTorch / TensorFlow: just some good old numpy!).
We actually construct a general-purpose fully-connected feed-forward network that can be instantiated into either KAN or classic MLP as sub-cases. This exercise also serves as a valuable way to review various concepts related to backpropagation in general feed-forward networks.
The code discussed in this post is available in the GitHub repository [3].
Specifically, all figures can be generated via the Jupyter notebook here.
We emphasize that our goal here is pedagogy, rather than efficiency.
1. A versatile neuron architecture
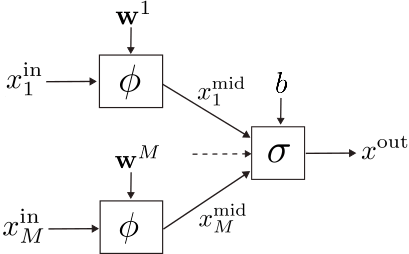
We start by describing a general neuron structure capable of accommodating both KANs and MLPs as sub-cases.
We call ![{\mathbf{x}^{\mathrm{in}}=[x^{\mathrm{in}}_1,\dots,x^{\mathrm{in}}_M]}](https://s0.wp.com/latex.php?latex=%7B%5Cmathbf%7Bx%7D%5E%7B%5Cmathrm%7Bin%7D%7D%3D%5Bx%5E%7B%5Cmathrm%7Bin%7D%7D_1%2C%5Cdots%2Cx%5E%7B%5Cmathrm%7Bin%7D%7D_M%5D%7D&bg=ffffff&fg=000000&s=1&c=20201002)


![{\mathbf{w}^i=[w^i_1,\dots,w^i_K]}](https://s0.wp.com/latex.php?latex=%7B%5Cmathbf%7Bw%7D%5Ei%3D%5Bw%5Ei_1%2C%5Cdots%2Cw%5Ei_K%5D%7D&bg=ffffff&fg=000000&s=1&c=20201002)


Then, the node function 


where 
A “loss” function 



We leave the term 
On the other hand, the terms 


For backpropagation purposes, it is also convenient to store the output derivative with respect to the inputs:

We report below the Python class implementing the general-purpose neuron architecture just described.
import numpy as np
class Neuron:
def __init__(self, n_in, n_weights_per_edge, weights_range=None):
self.n_in = n_in # n. inputs
self.n_weights_per_edge = n_weights_per_edge
weights_range = [-1, 1] if weights_range is None else weights_range
self.weights = np.random.uniform(weights_range[0], weights_range[-1], size=(self.n_in, self.n_weights_per_edge))
self.bias = 0
self.xin = None # input variable
self.xmid = None # edge variables
self.xout = None # output variable
self.dxout_dxmid = None # derivative d xout / d xmid: (n_in, )
self.dxout_dbias = None # derivative d xout / d bias
self.dxmid_dw = None # derivative d xmid / d w: (n_in, n_par_per_edge)
self.dxmid_dxin = None # derivative d xmid / d xin
self.dxout_dxin = None # (composite) derivative d xout / d xin
self.dxout_dw = None # (composite) derivative d xout / d w
self.dloss_dw = np.zeros((self.n_in, self.n_weights_per_edge)) # (composite) derivative d loss / d w
self.dloss_dbias = 0 # (composite) derivative d loss / d bias
def __call__(self, xin):
# forward pass: compute neuron's output
self.xin = np.array(xin)
self.get_xmid()
self.get_xout()
# compute internal derivatives
self.get_dxout_dxmid()
self.get_dxout_dbias()
self.get_dxmid_dw()
self.get_dxmid_dxin()
assert self.dxout_dxmid.shape == (self.n_in, )
assert self.dxmid_dxin.shape == (self.n_in, )
assert self.dxmid_dw.shape == (self.n_in, self.n_weights_per_edge)
# compute external derivatives
self.get_dxout_dxin()
self.get_dxout_dw()
return self.xout
def get_xmid(self):
# compute self.xmid
pass
def get_xout(self):
# compute self.xout
pass
def get_dxout_dxmid(self):
# compute self.dxout_dxmid
pass
def get_dxout_dbias(self):
# compute self.dxout_dbias
pass #self.dxout_dbias = 0 # by default
def get_dxmid_dw(self):
# compute self.dxmid_dw
pass
def get_dxmid_dxin(self):
# compute self.dxmid_dxin
pass
def get_dxout_dxin(self):
self.dxout_dxin = self.dxout_dxmid * self.dxmid_dxin
def get_dxout_dw(self):
self.dxout_dw = np.diag(self.dxout_dxmid) @ self.dxmid_dw
def update_dloss_dw_dbias(self, dloss_dxout):
self.dloss_dw += self.dxout_dw * dloss_dxout
self.dloss_dbias += self.dxout_dbias * dloss_dxout
def gradient_descent(self, eps):
self.weights -= eps * self.dloss_dw
self.bias -= eps * self.dloss_dbias
Note that a number of derivative terms are not specified, since they depend on the edge and node functions 
1.1. “Classic” neuron
We now instantiate the general neuron structure into the “classic” one, with linear edge functions 

The output variable is obtained by applying the activation function

The activation function 



import math
def relu(x, get_derivative=False):
return x * (x > 0) if not get_derivative else 1.0 * (x >= 0)
def tanh_act(x, get_derivative=False):
if not get_derivative:
return math.tanh(x)
return 1 - math.tanh(x) ** 2
def sigmoid_act(x, get_derivative=False):
if not get_derivative:
return 1 / (1 + math.exp(-x))
return sigmoid_act(x) * (1 - sigmoid_act(x))
We can now compute all the auxiliary derivatives needed to finally produce the loss gradient via (3), (4):

where 
Now, let’s dive into the code. The NeuronNN class inherits from the Neuron class template and computes the derivatives as described above.
class NeuronNN(Neuron):
def __init__(self, n_in, weights_range=None, activation=relu):
super().__init__(n_in, n_weights_per_edge=1, weights_range=weights_range)
self.activation = activation
self.activation_input = None
def get_xmid(self):
self.xmid = self.weights[:, 0] * self.xin
def get_xout(self):
self.activation_input = sum(self.xmid.flatten()) + self.bias
self.xout = self.activation(self.activation_input, get_derivative=False)
def get_dxout_dxmid(self):
self.dxout_dxmid = self.activation(self.activation_input, get_derivative=True) * np.ones(self.n_in)
def get_dxout_dbias(self):
self.dxout_dbias = self.activation(self.activation_input, get_derivative=True)
def get_dxmid_dw(self):
self.dxmid_dw = np.reshape(self.xin, (-1, 1))
def get_dxmid_dxin(self):
self.dxmid_dxin = self.weights.flatten()
1.2. KAN neuron
As described in the seminal paper [1], the peculiarity of Kolmogorov-Arnold Network (KAN) neuron is in the edge function 

Hence, the derivative write:

In [1], it is suggested that the edge functions 
from scipy.interpolate import BSpline
def get_bsplines(x_bounds, n_fun, degree=3, **kwargs):
grid_len = n_fun - degree + 1
step = (x_bounds[1] - x_bounds[0]) / (grid_len - 1)
edge_fun, edge_fun_der = {}, {}
# SiLU bias function
edge_fun[0] = lambda x: x / (1 + np.exp(-x))
edge_fun_der[0] = lambda x: (1 + np.exp(-x) + x * np.exp(-x)) / np.power((1 + np.exp(-x)), 2)
# B-splines
t = np.linspace(x_bounds[0] - degree * step, x_bounds[1] + degree * step, grid_len + 2 * degree)
t[degree], t[-degree - 1] = x_bounds[0], x_bounds[1]
for ind_spline in range(n_fun - 1):
edge_fun[ind_spline + 1] = BSpline.basis_element(t[ind_spline:ind_spline + degree + 2], extrapolate=False)
edge_fun_der[ind_spline + 1] = edge_fun[ind_spline + 1].derivative()
return edge_fun, edge_fun_der

The node function can be simply expressed as the sum of intermediate variables (with bias 

In our implementation, to simplify matters and avoid the need of updating of spline grids (see [1]) we actually use 
class NeuronKAN(Neuron):
def __init__(self, n_in, n_weights_per_edge, x_bounds, weights_range=None, get_edge_fun=get_bsplines, **kwargs):
self.x_bounds = x_bounds
super().__init__(n_in, n_weights_per_edge=n_weights_per_edge, weights_range=weights_range)
self.edge_fun, self.edge_fun_der = get_edge_fun(self.x_bounds, self.n_weights_per_edge, **kwargs)
def get_xmid(self):
# apply edge functions
self.phi_x_mat = np.array([self.edge_fun[b](self.xin) for b in self.edge_fun]).T
self.phi_x_mat[np.isnan(self.phi_x_mat)] = 0
self.xmid = (self.weights * self.phi_x_mat).sum(axis=1)
def get_xout(self):
# note: node function <- tanh to avoid any update of spline grids
self.xout = tanh_act(sum(self.xmid.flatten()), get_derivative=False)
def get_dxout_dxmid(self):
self.dxout_dxmid = tanh_act(sum(self.xmid.flatten()), get_derivative=True) * np.ones(self.n_in)
def get_dxmid_dw(self):
self.dxmid_dw = self.phi_x_mat
def get_dxmid_dxin(self):
phi_x_der_mat = np.array([self.edge_fun_der[b](self.xin) if self.edge_fun[b](self.xin) is not None else 0
for b in self.edge_fun_der]).T # shape (n_in, n_weights_per_edge)
phi_x_der_mat[np.isnan(phi_x_der_mat)] = 0
self.dxmid_dxin = (self.weights * phi_x_der_mat).sum(axis=1)
def get_dxout_dbias(self):
# no bias in KAN!
self.dxout_dbias = 0
2. Fully connected layers
A layer is simply a collection of 


Note that, if the 

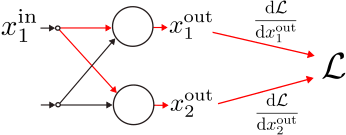
By chain rule, 

class FullyConnectedLayer:
def __init__(self, n_in, n_out, neuron_class=NeuronNN, **kwargs):
self.n_in, self.n_out = n_in, n_out
self.neurons = [neuron_class(n_in) if (kwargs == {}) else neuron_class(n_in, **kwargs) for _ in range(n_out)]
self.xin = None # input, shape (n_in,)
self.xout = None # output, shape (n_out,)
self.dloss_dxin = None # d loss / d xin, shape (n_in,)
self.zero_grad()
def __call__(self, xin):
# forward pass
self.xin = xin
self.xout = np.array([nn(self.xin) for nn in self.neurons])
return self.xout
def zero_grad(self, which=None):
# reset gradients to zero
if which is None:
which = ['xin', 'weights', 'bias']
for w in which:
if w == 'xin': # reset layer's d loss / d xin
self.dloss_dxin = np.zeros(self.n_in)
elif w == 'weights': # reset d loss / dw to zero for every neuron
for nn in self.neurons:
nn.dloss_dw = np.zeros((self.n_in, self.neurons[0].n_weights_per_edge))
elif w == 'bias': # reset d loss / db to zero for every neuron
for nn in self.neurons:
nn.dloss_dbias = 0
else:
raise ValueError('input \'which\' value not recognized')
def update_grad(self, dloss_dxout):
# update gradients by chain rule
for ii, dloss_dxout_tmp in enumerate(dloss_dxout):
# update layer's d loss / d xin via chain rule
# note: account for all possible xin -> xout -> loss paths!
self.dloss_dxin += self.neurons[ii].dxout_dxin * dloss_dxout_tmp
# update neuron's d loss / dw and d loss / d bias
self.neurons[ii].update_dloss_dw_dbias(dloss_dxout_tmp)
return self.dloss_dxin
Note that we also implemented a method that resets the loss derivatives to zero, which will prove crucial during training.
3. Loss function
Before stacking layers and build a complete feed-forward network, we still need to define a loss function. This function evaluates how closely the network’s predictions align with a ground truth represented by 
Let 

with associated derivative:

In case of classification tasks, 


Note that the logarithm argument is the network’s output soft-max. Thus, by minimizing the loss, we encourage the 

class Loss:
def __init__(self, n_in):
self.n_in = n_in
self.y, self.dloss_dy, self.loss, self.y_train = None, None, None, None
def __call__(self, y, y_train):
# y: output of network
# y_train: ground truth
self.y, self.y_train = np.array(y), y_train
self.get_loss()
self.get_dloss_dy()
return self.loss
def get_loss(self):
# compute loss l(y, y_train)
pass
def get_dloss_dy(self):
# compute gradient of loss wrt y
pass
class SquaredLoss(Loss):
def get_loss(self):
# compute loss l(xin, y)
self.loss = np.mean(np.power(self.y - self.y_train, 2))
def get_dloss_dy(self):
# compute gradient of loss wrt xin
self.dloss_dy = 2 * (self.y - self.y_train) / self.n_in
class CrossEntropyLoss(Loss):
def get_loss(self):
# compute loss l(xin, y)
self.loss = - np.log(np.exp(self.y[self.y_train[0]]) / sum(np.exp(self.y)))
def get_dloss_dy(self):
# compute gradient of loss wrt xin
self.dloss_dy = np.exp(self.y) / sum(np.exp(self.y))
self.dloss_dy[self.y_train] -= 1
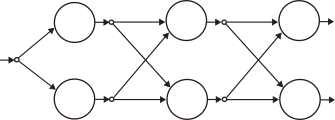
4. Feed-Forward network
Finally, we wrap things up by stacking an arbitrary number of layers together to form a fully-connected feed-forward network.
During training, the network accepts a list of pairs of the kind 
In the forward pass, 

During backpropagation, the loss gradient with respect a layer’s input is first initialized as

and then updated at each layer in backward fashion, from last to first, via (13):

where the term 
At the same time, each layer’s neuron computes the loss gradient with respect to its parameters as in (3)–(4), where the term 
Finally, the neuron weights and biases are updated via gradient descent:


Note that, for the sake of simplicity, we simply set 
from tqdm import tqdm
class FeedForward:
def __init__(self, layer_len, eps=.0001, seed=None, loss=SquaredLoss, **kwargs):
self.seed = np.random.randint(int(1e4)) if seed is None else int(seed)
np.random.seed(self.seed)
self.layer_len = layer_len
self.eps = eps
self.n_layers = len(self.layer_len) - 1
self.layers = [FullyConnectedLayer(layer_len[ii], layer_len[ii + 1], **kwargs) for ii in range(self.n_layers)]
self.loss = loss(self.layer_len[-1])
self.loss_hist = None
def __call__(self, x):
# forward pass
x_in = x
for ll in range(self.n_layers):
x_in = self.layers[ll](x_in)
return x_in
def backprop(self):
# gradient backpropagation
delta = self.layers[-1].update_grad(self.loss.dloss_dy)
for ll in range(self.n_layers - 1)[::-1]:
delta = self.layers[ll].update_grad(delta)
def gradient_descent_par(self):
# update parameters via gradient descent
for ll in self.layers:
for nn in ll.neurons:
nn.gradient_descent(self.eps)
def train(self, x_train, y_train, n_iter_max=10000, loss_tol=.1):
self.loss_hist = np.zeros(n_iter_max)
x_train, y_train = np.array(x_train), np.array(y_train)
assert x_train.shape[0] == y_train.shape[0], 'x_train, y_train must contain the same number of samples'
assert x_train.shape[1] == self.layer_len[0], 'shape of x_train is incompatible with first layer'
pbar = tqdm(range(n_iter_max))
for it in pbar:
loss = 0 # reset loss
for ii in range(x_train.shape[0]):
x_out = self(x_train[ii, :]) # forward pass
loss += self.loss(x_out, y_train[ii, :]) # accumulate loss
self.backprop() # backward propagation
[layer.zero_grad(which=['xin']) for layer in self.layers] # reset gradient wrt xin to zero
self.loss_hist[it] = loss
if (it % 10) == 0:
pbar.set_postfix_str(f'loss: {loss:.3f}') #
if loss < loss_tol:
pbar.set_postfix_str(f'loss: {loss:.3f}. Convergence has been attained!')
self.loss_hist = self.loss_hist[: it]
break
self.gradient_descent_par() # update parameters
[layer.zero_grad(which=['weights', 'bias']) for layer in self.layers] # reset gradient wrt par to zero
Note that in practice the training data comes in batches, hence the loss and the corresponding gradients are summed across all the batch data. Since gradients are accumulated during the backward pass, they must be reinitialized to zero after each batch.
5. Let’s see from-scratch KAN and MLP in action!
After quite some work, we are finally ready to play with some training data! (see [Jupyter Notebook])
We start with a simple 1D regression problem:
n_iter_train_1d = 500
loss_tol_1d = .05
seed = 476
x_train = np.linspace(-1, 1, 50).reshape(-1, 1)
y_train = .5 * np.sin(4 * x_train) * np.exp(-(x_train+1)) + .5 # damped sinusoid
# KAN training
kan_1d = FeedForward([1, 2, 2, 1], # layer size
eps=.01, # gradient descent parameter
n_weights_per_edge=7, # n. edge functions
neuron_class=NeuronKAN,
x_bounds=[-1, 1], # input domain bounds
get_edge_fun=get_bsplines, # edge function type (B-splines ot Chebyshev)
seed=seed,
weights_range=[-1, 1])
kan_1d.train(x_train,
y_train,
n_iter_max=n_iter_train_1d,
loss_tol=loss_tol_1d)
# MLP training
mlp_1d = FeedForward([1, 13, 1], # layer size
eps=.005, # gradient descend parameter
activation=relu, # activation type (ReLU, tanh or sigmoid)
neuron_class=NeuronNN,
seed=seed,
weights_range=[-.5, .5])
mlp_1d.train(x_train,
y_train,
n_iter_max=n_iter_train_1d,
loss_tol=loss_tol_1d)

We continue with a slightly more involved 2D regression problem:
def fun2d(X1, X2):
return X1 * np.power(X2, .5)
X1, X2 = np.meshgrid(np.linspace(0, .8, 8), np.linspace(0, 1, 10))
Y_training = fun2d(X1, X2)
x_train2d = np.concatenate((X1.reshape(-1, 1), X2.reshape(-1, 1)), axis=1)
y_train2d = Y_training.reshape(-1, 1)

We conclude with a classification problem on scikit-learn’s half-moon shaped dataset:
from sklearn import datasets
n_samples = 50
noise = 0.1
x_train_cl, y_train_cl = datasets.make_moons(n_samples=n_samples, noise=noise)

References
[1] Ziming Liu, Yixuan, Sachin Vaidya, Fabian Ruehle, James Halverson, Marin Soljacic, Thomas Y. Hou, Max Tegmark. KAN: Kolmogorov-Arnold networks. arXiv preprint arXiv:2404.19756, 2024 [LINK]
[2] Ziming Liu. YouTube video KAN: Kolmogorov-Arnold Networks [LINK]
[3] Lorenzo Maggi, GitHub repository [LINK]

Leave a reply to Melissa Ingle Cancel reply